

RTK 解决方案
RTK GPS board / RTK GNSS board
介绍
随着全球定位系统(GPS)技术的快速发展,精确定位在各个产业中被广泛应用,尤其是在测绘、农业、运输和自动驾驶领域。 LOCOSYS Technology 推出了RTK模组,该模组结合了L1 和L5频段的优势,为高精度定位提供了更稳定的解决方案。
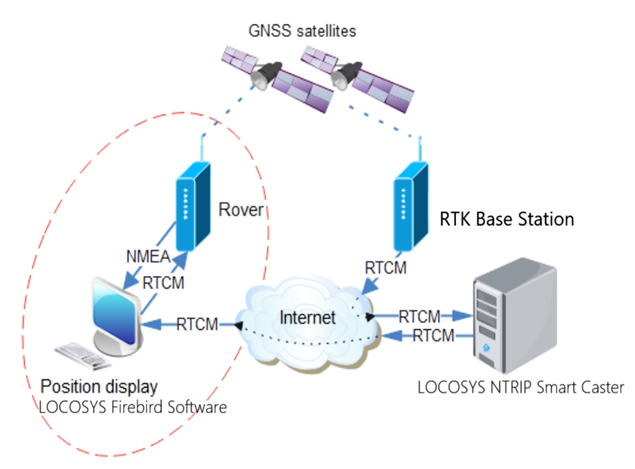
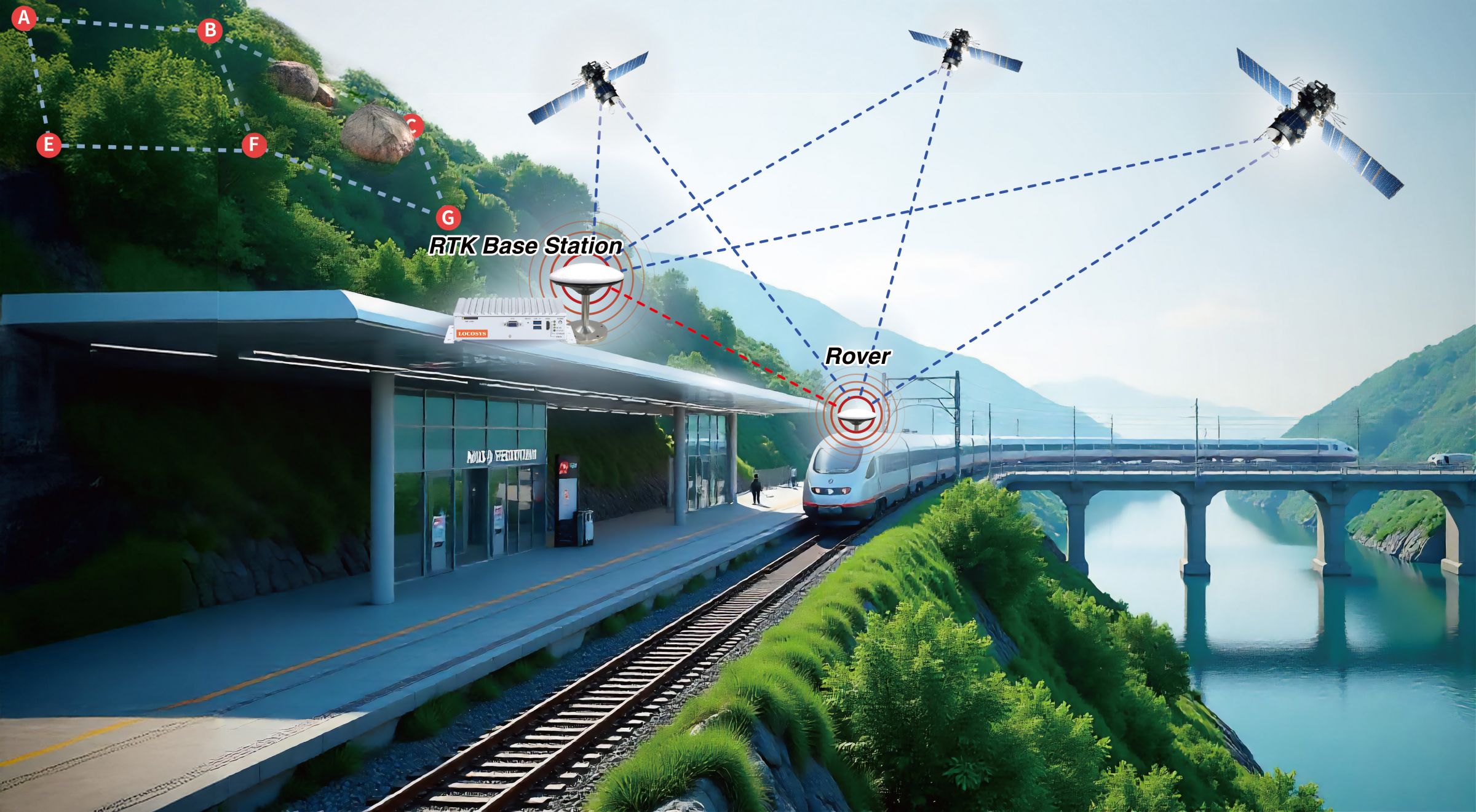
LOCOSYS RTK模组是一款高性能的全球导航卫星系统(GNSS)接收器,专为需要高精度定位的应用而设计。此模组支持多个卫星系统,包括美国的GPS、俄罗斯的GLONASS、欧洲的Galileo和中国的北斗,并能够同时接收L1 和L5频段的信号。L1频段提供良好的覆盖范围,而L5 频段则具备更强的抗干扰性和更高的定位精度,确保LOCOSYS RTK模组即使在复杂环境下也能维持稳定的定位性能。此外,该模组可用作基站或移动站,增强了其在多种应用场景中的灵活性。
本产品所采用的RTK(即时动态定位)技术可实现厘米级的定位精度,这对于需要精确数据的应用至关重要。例如,在农业领域,精确的定位可以提高作物产量和质量;在测绘中,它可以减少工作时间并提高数据准确性。此外,LOCOSYS RTK 模组的快速初始化时间和强大的抗干扰能力进一步增强了其在动态环境中的实用性,使其成为自动驾驶技术、智慧交通系统和**地理资讯系统(GIS)**的理想选择。
LOCOSYS RTK模组的设计也充分考虑了易用性和灵活性。其结构小巧、功耗低,便于集成到各种设备中,能够灵活应用于不同的场景。此外,该模组提供丰富的接口选择,便于根据使用者需求进行二次开发,进一步拓展了其应用范围。
总而言之,LOCOSYS RTK模组凭借其卓越的性能与灵活的应用设计,为高精度定位提供了全新的解决方案。随着定位技术的不断进步,我们期待该产品在更多领域中发挥其潜力,推动行业的创新与发展。







新闻稿
 台湾卓越无人机联盟参访大辰科技领先企业 聚焦全球定位技术与无人机应用
台湾卓越无人机联盟参访大辰科技领先企业 聚焦全球定位技术与无人机应用台北时间上午10点,台湾卓越无人机海外商机联盟在颜东标的带领下,由汉翔航空工业、工业技术研究院及经济部航太产业推动小组等产业代表组成参访团,莅临智慧制造领域的领先企业进行技术交流。本次参访中,Locosys大辰科技分享了在RTK(即时动态定位)、惯性导航技术,以及天线应用于无人机系统上的最新成果,并特别介绍了飞行路径自主规划演算法等技术亮点。此外,生产品质管理系统的导入及其助力智慧制造的成功经验,也成为交流重点之一。
阅读更多 LOCOSYS大辰科技参加新北电动车产业链博览会展现领先智慧定位技术
LOCOSYS大辰科技参加新北电动车产业链博览会展现领先智慧定位技术为推动台湾电动车产业发展并促进国际交流,新北市政府举办「电动车产业链博览会」,盛大汇聚国内外知名企业与创新新创公司共同参与。作为全球定位技术的领导者,LOCOSYS大辰科技在本次展会中亮相,展示其最新的高精度定位技术,致力于推动电动车产业迈向智慧化与永续发展。新北市市长侯友宜莅临LOCOSYS大辰科技摊位,对其创新技术给予高度肯定。
阅读更多 LOCOSYS大辰科技推出全新高性能SONY (GNSS/RTK) 全球卫星定位模组
LOCOSYS大辰科技推出全新高性能SONY (GNSS/RTK) 全球卫星定位模组LOCOSYS大辰科技欣然宣布推出三款全新高性能GNSS/RTK 卫星定位模组,包括SO-1612-15、SO-1612-1N 和SOR-1612。模组采用日本知名晶片大厂SONY 的最新CXD...
阅读更多